
Мичиганский научный Колесный импульсный преобразователь высокого разрешения (WPT) - это оптический кодировщик, который крепится к гайкам колеса транспортного средства. WPT обычно используется для отслеживания местоположения и скорости транспортного средства для таких приложений, как управление автопарком и автономное отслеживание транспортных средств. Это тематическое исследование продемонстрирует точность одновременного использования двух колесных импульсных преобразователей, сравнивая измерения положения и скорости с данными GPS.
Как это работает
Сигнал от энкодера используется для вычисления углового положения и скорости колеса. Данные, записанные двумя WPT по обе стороны от автомобиля, можно усреднить, чтобы найти центр, что дает наиболее точное представление о расстоянии и скорости, пройденных автомобилем. Картографические транспортные средства часто используют WPT для компенсации перерывов в сигнале GPS, позволяя отслеживать расстояние, пройденное во время потери сигнала. В этом исследовании высокое разрешение данных WPT показало себя намного лучше, чем разрешение датчика GPS, который использовался, из-за его высокой частоты дискретизации 10,000 XNUMX Гц.
Испытательная установка
Чтобы сравнить результаты датчика импульсов колеса с результатами GPS, к транспортному средству были подключены две системы WPT: одна сзади справа, а другая - сзади слева. Преобразователи были смонтированы на задних колесах, так что вращательное движение передних колес не нужно было бы компенсировать в данных. Устройство GPS было размещено на крыше автомобиля в центре крыши над задними колесами, где оно давало наиболее точные показания. Расстояние и скорость левого и правого WPT были усреднены, чтобы соответствовать сигналу GPS в центре транспортного средства. Курс длиной в милю, показанный ниже, вместе с графиком широты и долготы от GPS, включает маневры кругового и зигзагообразного движения.
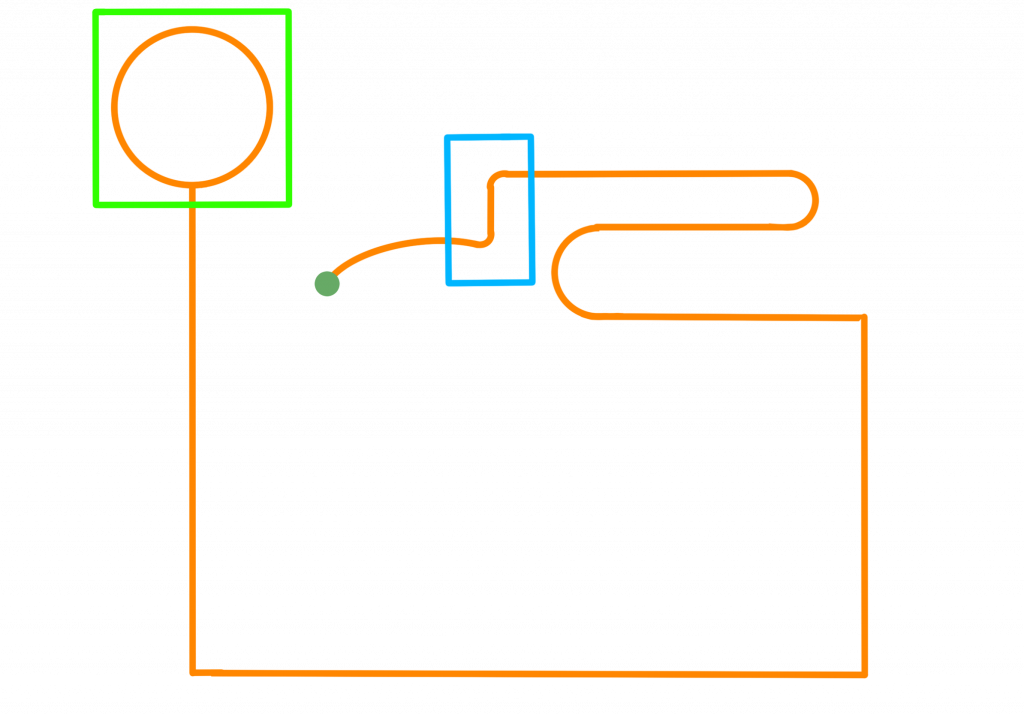
Схема тестового трека
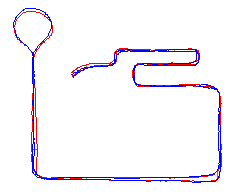
Данные GPS с тестового трека
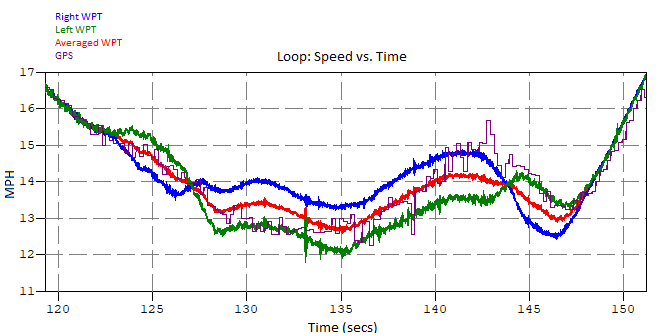
Петля
При движении против часовой стрелки по круговой части испытательного трека (показанной зеленым цветом выше) можно ожидать, что скорость и расстояние правого колеса будут намного выше, чем левого. Глядя на данные, представленные ниже, выясняется, что это правда. Скорости правого (синий) и левого (зеленый) колеса усреднены (красный) и почти идеально совпадают с данными GPS (фиолетовый).
Зигзагообразный путь
Область быстрого поворота вправо и влево, показанная в синем квадрате на контуре тестовой трассы, представляет собой еще одну интересную перспективу. На графике скоростей ниже автомобиль маневрировал с быстрым поворотом налево, а затем сразу направо. Форма «W», созданная этим, показывает, что левое колесо (фиолетовое) двигалось медленнее, чем правое (зеленое) во время левого поворота, а затем левое колесо двигалось быстрее, чем правое, во время правого поворота. В то время как две противостоящие стороны меняются местами на протяжении всего маневра, вычисленное среднее (красный) и данные GPS (синий) остаются близко друг к другу в середине.
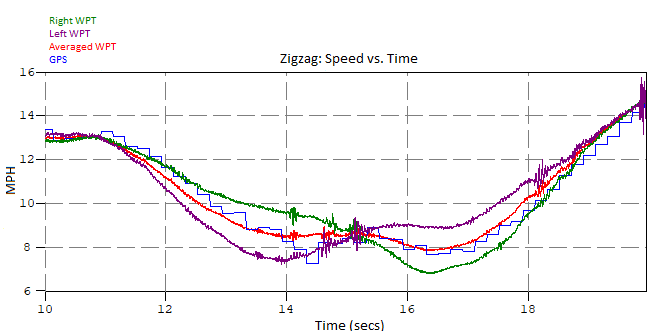
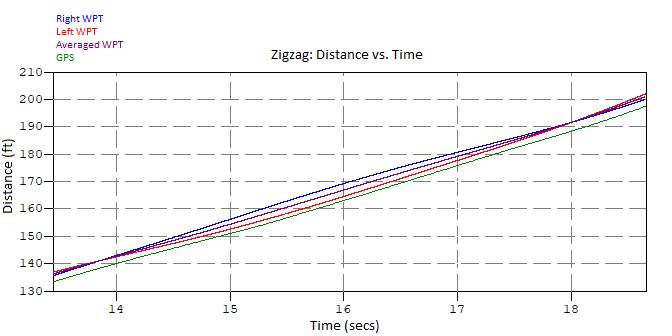
Промежуток времени между двумя точками пересечения на графике ниже - это место, где произошли левые и правые повороты. Правое колесо (синее) превосходит левое колесо (красное) по пройденному расстоянию, поскольку оно имеет больший радиус поворота во время левого поворота, который начинается примерно через 14 секунд и заканчивается примерно через 15.5 секунд. В этот момент правое колесо прошло дальше, чем левое. Правый поворот начинается незадолго до 17 секунд, а левое колесо догоняет правое колесо к тому времени, когда поворот заканчивается примерно на 18 секундах. Среднее (пурпурное) пройденное расстояние остается в центре между ними. Поскольку наклон среднего расстояния и GPS одинаковы, они по-прежнему регистрируют одинаковую скорость и изменение расстояния. Однако GPS отстает на несколько футов от руля, отсюда и небольшое смещение данных.
Ошибка
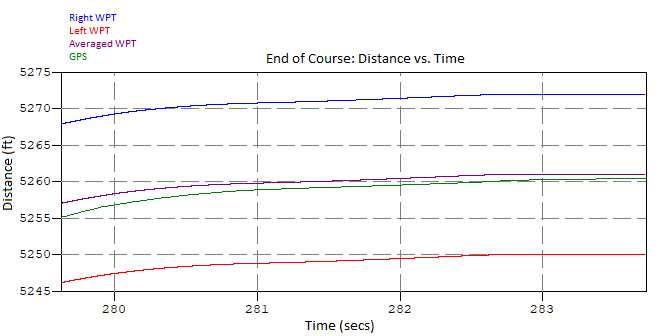
Последние несколько точек данных теста могут показать преимущества использования двух WPT, а не одного. Если бы использовался только один WPT, максимальная ошибка записанных расстояний составила бы 0.22%. Однако при установке двух БПЭ и их усреднении погрешность составляет всего 0.0115%, т.е. уменьшение в 19 раз. Это показывает, что использование двух колесных импульсных преобразователей может помочь уменьшить ошибку, которая может накапливаться за несколько оборотов.
Этот тест - лишь один из множества различных тестов, в которых используются датчики импульсов колеса. Наличие прочной и точной системы измерения полезно для точного отслеживания положения и скорости автомобиля в любых условиях. Если вы хотите обсудить свое приложение для тестирования колес, свяжитесь с представителем Michigan Scientific прямо сейчас